




A constructed method of manufactured solutions and code verification for 2D Lagrangian radiation hydrodynamic equations
-
摘要: 人为构造解方法是复杂多物理过程耦合程序正确性验证的重要方法之一,适用于二维拉氏大变形网格的流体、辐射耦合人为解模型较为少见。针对拉氏辐射流体力学程序正确性验证的需要,从二维拉氏辐射流体力学方程组出发,基于坐标变换技术,给出了拉氏空间到欧氏空间的物理变量导数关系式,开展了辐射流体耦合的人为解构造方法研究,构造了一类质量方程无源项的二维人为解模型,并应用于非结构拉氏程序LAD2D辐射流体力学计算的正确性考核,为流体运动网格上的辐射扩散计算提供了一种有效手段。数值结果显示观测到的数值模拟收敛阶与理论分析一致。Abstract: The method of manufactured solutions (MMS) is a fundamental part of code verification for the coupling codes with complex multi-physics process, the MMS for multi-dimension Lagrangian radiation hydrodynamics with large deformation meshes is very sparse yet. In this paper, a new constructed method of manufactured solutions for 2D Lagrangian radiation hydrodynamic equations was proposed based on the derivative relations of physical variables between the Lagrangian space and the Eulerian space. The manufactured solution models without additional source terms in the mass equation could be used to solve diffusion problems on fluid moving meshes and were applied to the verification of the 2D Lagrangian radiation hydrodynamic codes. The numerical results show that the observed order of accuracy matches the formal order of accuracy.
-
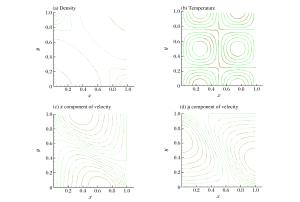
图 2 t=0.125时刻流体运动网格上密度、温度、x方向速度、y方向速度等值线(红:数值解绿:精确解)
Figure 2. Contours of density, temperature, x and y components of velocity(red: numerical solution; green: exact solution)
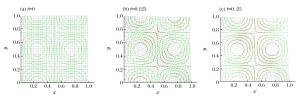
图 3 不同时刻流体运动网格上温度等值线
(红:数值解绿:精确解)
Figure 3. Contours of temperature on fluid meshes at different time
(red: numerical solution; green: exact solution)
表 1 温度收敛误差和收敛阶
Table 1. Convergence errors and orders for temperature
网格数 L2模误差 L2模误差收敛阶 最大模误差 最大模误差收敛阶 8×8 2.82×10-2 1.04×10-1 16×16 7.13×10-3 1.98 3.06×10-2 1.76 32×32 1.79×10-3 1.99 7.97×10-3 1.94 64×64 4.49×10-4 2.00 2.01×10-3 1.99 128×128 1.12×10-4 2.00 5.03×10-4 2.00  下载: 导出CSV
下载: 导出CSV
-
[1] OBERKAMPF W L, ROY C J. Verification and validation in scientific computing[M]. New York:Cambridge University Press, 2010. [2] 王瑞利, 江松.多物理耦合非线性偏微分方程与数值解不确定度量化数学方法[J].中国科学:数学, 2015, 45(6):723-738. DOI: 10.1360/N012014-00115.WANG Ruili, JIANG Song. Mathematical methods for uncertainty quantification in nonlinear multi-physics systems and their numerical simulations[J]. Scientia Sinica Mathematica, 2015, 45(6):723-738. DOI: 10.1360/N012014-00115. [3] 邓小刚, 宗文刚, 张来平, 等.计算流体力学中的验证与确认[J].力学进展, 2007, 37(2):279-288. doi: 10.3321/j.issn:1000-0992.2007.02.011DENG Xiaogang, ZONG Wengang, ZHANG Laiping, et al. Verification and validation in computational fluid dynamics[J]. Advances in Mechanics, 2007, 37(2):279-288. doi: 10.3321/j.issn:1000-0992.2007.02.011 [4] SALARI K, KNUPP P. Code verification by the method of manufactured solutions: SAND200-1444[R]. Sandia National Laboratories, 2000. [5] ROY C J, NELSON C C, SMITH T M, et al. Verification of Euler/Navier-Stokes codes using the method of manufactured solutions[J]. International Journal for Numerical Methods in Fluids, 2004, 44:599-620. DOI: 10.1002/fld.660. [6] 王瑞利, 刘全, 刘希强, 等.人为解方法及其在流体力学程序验证中的应用[J].计算机应用与软件, 2012, 29(11):4-7. DOI: 10.3969/j.issn.1000-386x.2012.11.002.WANG Ruili, LIU Quan, LIU Xiqiang, et al. Artificial solution and its applications in verification of hydrodynamics program[J]. Computer Applications and Software, 2012, 29(11):4-7. DOI: 10.3969/j.issn.1000-386x.2012.11.002. [7] 刘全, 王瑞利, 刘希强, 等.流体力学方程组一类人为解构造方法[J].数学的实践与认识, 2013, 43(8):176-182. doi: 10.3969/j.issn.1000-0984.2013.08.024LIU Quan, WANG Ruili, LIU Xiqiang, et al. One method of artificial solution to 2D hydrodynamics euler equation[J]. Mathematics in Practice and Theory, 2013, 43(8):176-182. doi: 10.3969/j.issn.1000-0984.2013.08.024 [8] 刘希强, 王瑞利, 刘全.流体力学方程组人为解的构造及其应用[J].聊城大学学报(自然科学版), 2013, 26(2):1-3. doi: 10.3969/j.issn.1672-6634.2013.02.001LIU Xiqiang, WANG Ruili, LIU Quan. Manufactured solution of fluid mechanics equation of construction and its application[J]. Journal of Liaocheng University (Natural Science Edition), 2013, 26(2):1-3. doi: 10.3969/j.issn.1672-6634.2013.02.001 [9] 杨振虎.CFD程序验证的虚构解方法及其边界精度匹配问题[J].航空计算技术, 2007, 37(6):5-9. doi: 10.3969/j.issn.1671-654X.2007.06.002YANG Zhenhu. CFD code verification via the method of manufactured solution and its boundary accuracy match problem[J]. Aeronautical Computing Technique, 2007, 37(6):5-9. doi: 10.3969/j.issn.1671-654X.2007.06.002 [10] 刘全, 王瑞利, 林忠, 等.流体力学拉氏程序收敛性及数值计算不确定度初探[J].计算物理, 2013, 30(3):346-352. doi: 10.3969/j.issn.1001-246X.2013.03.004LIU Quan, WANG Ruili, LIN Zhong, et al. Asymptotic convergence analysis and quantification of uncertainty in Lagrangian computations[J]. Chinese Journal of Computational Physics, 2013, 30(3):346-352. doi: 10.3969/j.issn.1001-246X.2013.03.004 [11] 刘全, 王瑞利, 林忠, 等.爆轰计算JWL状态方程参数不确定度研究[J].爆炸与冲击, 2013, 33(6):647-654. doi: 10.3969/j.issn.1001-1455.2013.06.014LIU Quan, WANG Ruili, LIN Zhong, et al. Uncertainty quantification for JWL EOS parameters in explosive numerical simulation[J]. Explosion and Shock Waves, 2013, 33(6):647-654. doi: 10.3969/j.issn.1001-1455.2013.06.014 [12] 王瑞利, 刘全, 温万治.非嵌入式多项式混沌法在爆轰产物JWL参数评估中的应用[J].爆炸与冲击, 2015, 35(1):9-15. http://www.bzycj.cn/CN/abstract/abstract9419.shtmlWANG Ruili, LIU Quan, WEN Wanzhi. Non-intrusive polynomial chaos methods and its application in the parameters assessment of explosion product JWL[J]. Explosion and Shock Waves, 2015, 35(1):9-15. http://www.bzycj.cn/CN/abstract/abstract9419.shtml [13] 梁霄, 王瑞利.混合不确定度量化方法及其在计算流体动力学迎风格式中的应用[J].爆炸与冲击, 2016, 36(4):509-515. http://www.bzycj.cn/CN/abstract/abstract9625.shtmlLIANG Xiao, WANG Ruili. Mixed uncertainty quantification and its application in upwind scheme for computational fluid dynamics(CFD)[J]. Explosion and Shock Waves, 2016, 36(4):509-515. http://www.bzycj.cn/CN/abstract/abstract9625.shtml [14] 王瑞利, 梁霄.基于误差马尾图量化爆轰数值模拟结果的置信度[J].爆炸与冲击, 2017, 37(6):893-900. http://www.bzycj.cn/CN/abstract/abstract9811.shtmlWANG Ruili, LIANG Xiao. Confidence level of numerical simulation of detonation through quantifying the horsetail of errors[J]. Explosion and Shock Waves, 2017, 37(6):893-900. http://www.bzycj.cn/CN/abstract/abstract9811.shtml [15] 杨容, 杭旭登, 李敬宏.二维柱对称辐射输运基准模型及程序考核[J].计算物理, 2010, 27(4):533-540. doi: 10.3969/j.issn.1001-246X.2010.04.007YANG Rong, HANG Xudeng, LI Jinghong. A two-dimensional cylindric symmetric radiative transfer benchmark model and code tests[J]. Chinese Journal of Computational Physics, 2010, 27(4):533-540. doi: 10.3969/j.issn.1001-246X.2010.04.007 [16] 刘学哲, 余云龙, 王瑞利, 等.非结构任意多边形网格辐射扩散方程有限体积格式[J].数值计算与计算机应用, 2010, 31(4):259-270. http://d.old.wanfangdata.com.cn/Periodical/szjsyjsjyy201004003LIU Xuezhe, YU Yunlong, WANG Ruili, et al. A cell-centered finite volume scheme for discretizing diffusion equation[J]. Journal on Numerical Methods and Computer Applications, 2010, 31(4):259-270. http://d.old.wanfangdata.com.cn/Periodical/szjsyjsjyy201004003 [17] 刘全, 林忠, 王瑞利, 等.流体力学拉氏方程组一类人为解构造方法[J].河北师范大学学报(自然科学版), 2014, 38(5):451-455. DOI: 10.11826/j.issn.1000-5854.2014.05.004.LIU Quan, LIN Zhong, WANG Ruili, et al. One method of manufactured solution to 2D hydrodynamics Euler equations[J]. Journal of Hebei Normal University (Natural Science Edition), 2014, 38(5):451-455. DOI: 10.11826/j.issn.1000-5854.2014.05.004. [18] 余云龙, 林忠, 王瑞利, 等.辐射流体力学Lagrange方程组一类人为解构造方法[J].应用数学与力学, 2015, 36(1):110-118. DOI: 10.3879/j.issn.1000-0887.2015.01.010.YU Yunlong, LIN Zhong, WANG Ruili, et al. A method of manufactured solution for verification of Lagrangian radiation hydrodynamic codes[J]. Applied Mathematics and Mechanics, 2015, 36(1):110-118. DOI: 10.3879/j.issn.1000-0887.2015.01.010. [19] 王瑞利, 林忠, 温万治, 等.自主多介质拉氏自适应流体动力学软件LAD2D研制及其应用[J].计算机辅助工程, 2014, 23(2):1-7. DOI:10.13340/j.cae. 2014.02.001.WANG Ruili, LIN Zhong, WEN Wanzhi, et al. Development and application of adaptive multi-media Lagrangian fluid dynamics software LAD2D[J]. Computer Aided Engineering, 2014, 23(2):1-7. DOI:10.13340/j.cae. 2014.02.001. -




计量
- 文章访问数: 5229
- HTML全文浏览量: 1780
- PDF下载量: 48
- 被引次数: 0